Why I built it
MotivationProfessional 6-axis motion control sells for $50,000+ per day. I wanted to prove that a student DP could build one from scratch for under $2,500.
As a student cinematographer, I spent two years shooting on basic gimbals and dollies. These tools, however, limit you to 2 or 3 axes. Every time I storyboarded a complex camera move, I hit the same wall: real robotic motion control was priced for Marvel, not for student films.
But I wasn't just a DP. I'd already spent two years in an HRI lab engineering a 30-servo humanoid robot. I knew the motors, the control loops, the mechanical design patterns. So I asked a different question: what if I designed a cinema robot around lighter gear , like an FX3 instead of an ARRI and optimized the entire drivetrain for cost?
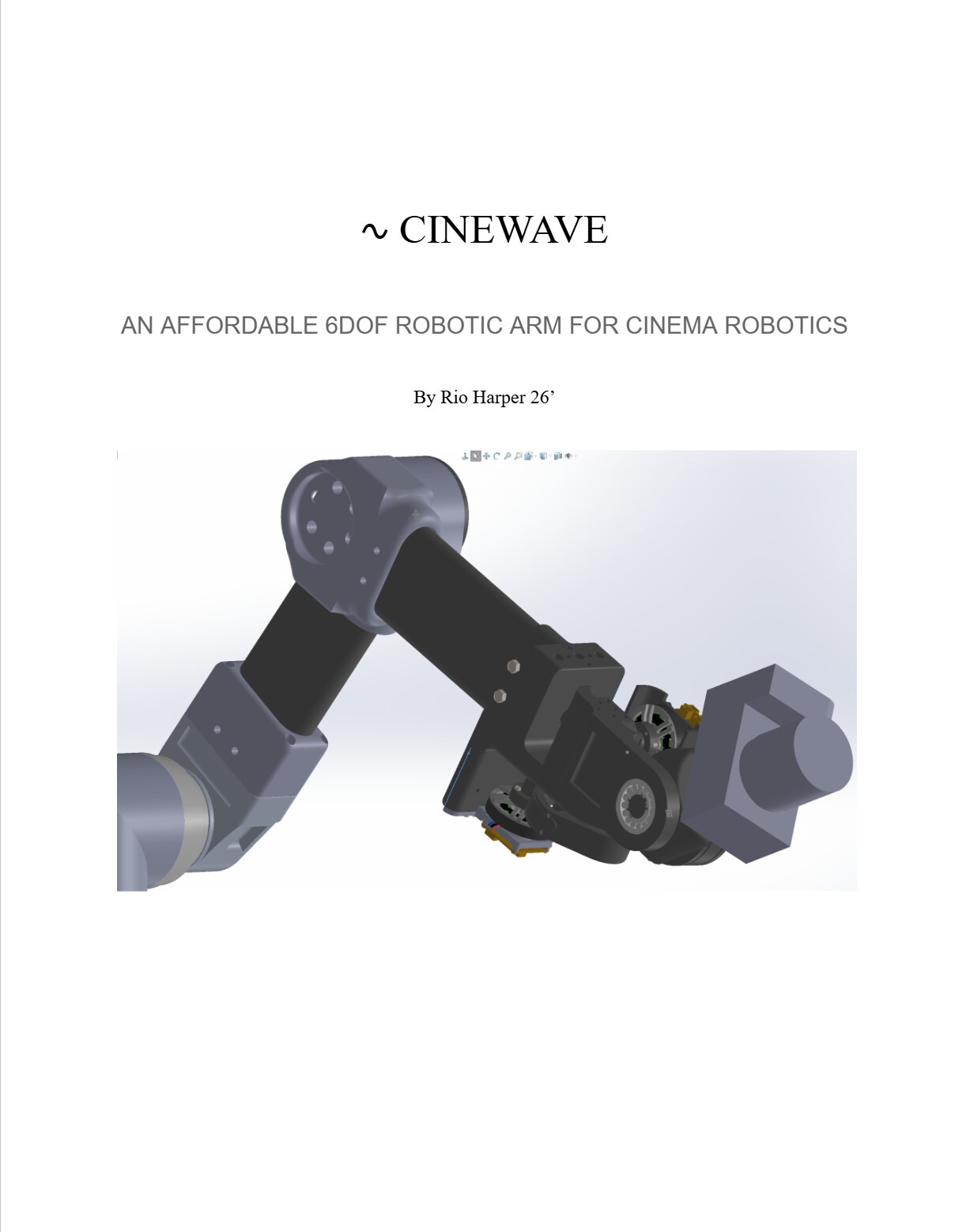
CineWave is the answer. Every part: The capstan wrist, the harmonic drives, the CAN-FD bus, and the Unreal Engine digital twin were designed, assembled, and coded by me alone as my Honors Capstone.
 Lab photo
Lab photo
What makes it special
EngineeringFull 6-DoF arm with absolute encoders, CAN-FD bus, and carbon-fiber links -- Two magnitudes cheaper than high-end alternatives
Harmonic drives on shoulder and elbow; capstan differential wrist for the final 3 axes.
Pultruded carbon-fiber 500mm arm links. These are stiff, lightweight, and long enough for sweeping camera moves.
Designed around the Sony FX3 class of camera, an indie filmmaker's favorite. compact, cinema-capable bodies that don't need a 15 kg payload.
Moteus controllers over CAN-FD on Raspberry Pi 5. Real-time enough for smooth, repeatable motion playback.
Every bracket, housing, and link designed in SOLIDWORKS. PA6-CF 3D-printed housings for strength at low weight.
 6-DOF RENDER
6-DOF RENDER
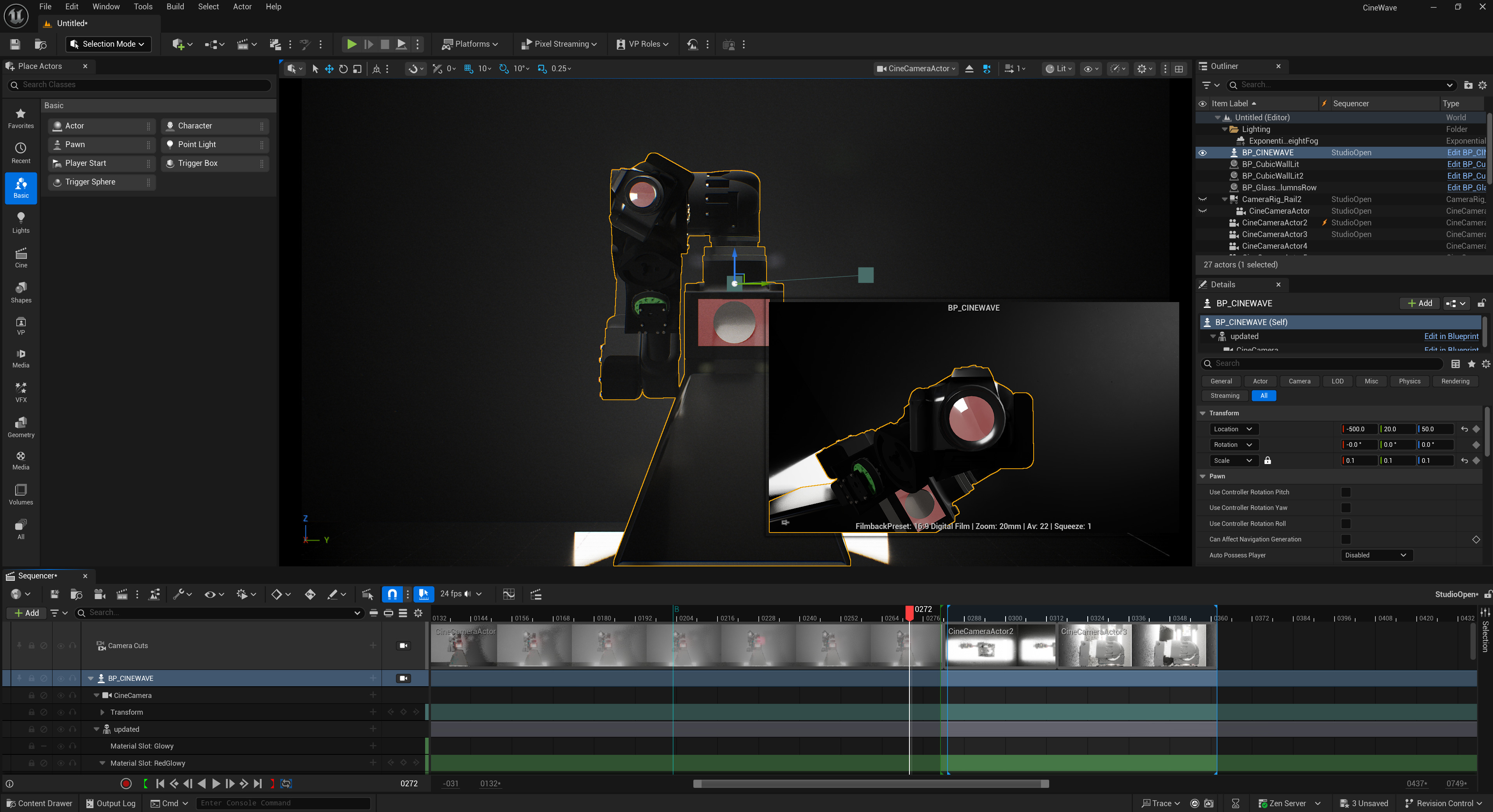 UE5 DIGITAL TWIN
UE5 DIGITAL TWIN
 PI 5 · CAN-FD
PI 5 · CAN-FD
Mixed drive architecture
Harmonic drives on the high-torque shoulder and elbow joints for near-zero backlash. The capstan drives on the wrist for the final 3 axes. Capstans are lighter, cheaper, and with continuous cable tension that eliminates gear-mesh slop. This hybrid approach keeps the cost down while maintaining positioning precision.
Unreal Engine 5 digital twin (WIP)
A real-time digital twin built in UE5 with Control Rig IK drives the physical arm. Plan shots in virtual space, preview camera paths, and execute them on hardware. This is the same virtual production workflow used on professional sets, but running on a student's Raspberry Pi instead of a Technodolly.
Solo build
Every discipline; Mechanical design, electrical, embedded firmware, computer vision, the UE5 pipeline and the cinematography was done by by myself through late (sometimes lonely) nights in the lab
Honors thesis
Renée Crown Honors ProgramThe full engineering story, from mechanical design, kinematic analysis, control architecture, and digital-twin pipeline is documented in my Renée Crown Honors Capstone thesis.
Covers the complete design rationale for every subsystem: why capstan over planetary for the wrist, harmonic drive sizing, CAN-FD bus topology, PID tuning with gravity feedforward, and the UE5 Control Rig integration. Very nerdy, be forewarned.
In action
UE5 sequence · Lab footageWrist articulation
Real-time controller support